自己組織化マップ(SOM)のアルゴリズムを実装している R のパッケージは次のようなものがある。
som パッケージの使い方
som パッケージ中の解析関数は som である。この関数に、解析したいデータをデータフレーム型のオブジェクト(変数)を与えて解析する。ここで利用するサンプルデータは R にデフォルトで入っている iris というデータセットを利用します。
library(som)
# サンプルデータをロード
data(iris)
val <- iris[, 1:4] # 数値データ
lab <- iris[, 5] # 分類(正解)
tag <- as.numeric(lab) # 正解データをプロットするための識別タグ
head(val)
## Sepal.Length Sepal.Width Petal.Length Petal.Width
## 1 5.1 3.5 1.4 0.2
## 2 4.9 3.0 1.4 0.2
## 3 4.7 3.2 1.3 0.2
## 4 4.6 3.1 1.5 0.2
## 5 5.0 3.6 1.4 0.2
## 6 5.4 3.9 1.7 0.4
head(tag)
## [1] 1 1 1 1 1 1
# 数値データを利用して10 X 10ピクセルの出力層を用意
model <- som(val, xdim = 10, ydim = 10)
# 出力層をプロット
plot(model)
# 実際のデータがどの座標にプロットされているかを表示させる
# points(model$visual$x, model$visual$y, pch = tag, col = tag, cex = 2)
# 上記のようにすると、データが重なり見づらくなるため、乱数を発生させて、位置を少しずらしてプロット
x.rand <- runif(nrow(iris), -0.2, 0.2)
y.rand <- runif(nrow(iris), -0.2, 0.2)
points(model$visual$x + x.rand, model$visual$y + y.rand, pch = tag, col = tag, cex = 2)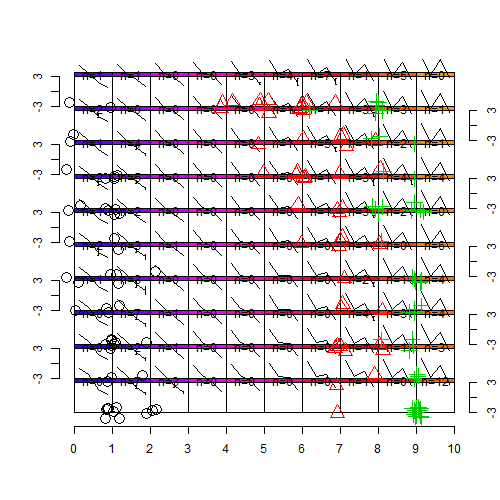
次のようにすることで、データのみをプロットすることができる。
plot(model$visual$x + x.rand, model$visual$y + y.rand, pch = tag, col = tag, cex = 2)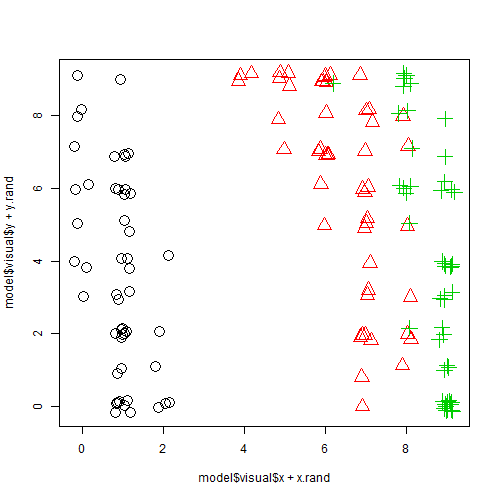
class パッケージの使い方
class パッケージに含まれている自己組織化マップの解析関数は SOM 関数である。サンプルデータとして R のパッケージに含まれる iris を利用する。(kohonen パッケージとの使い方がほぼ同じ。)
library(class)
# サンプルデータをロード
data(iris)
val <- iris[, 1:4] # 数値データ
lab <- iris[, 5] # 分類(正解)
tag <- as.numeric(lab) # 正解データをプロットするための識別タグ
# 数値データを利用して10 X 10ピクセルの出力層を用意
layer <- somgrid(xdim = 10, ydim = 10)
model <- SOM(val, grid = layer)
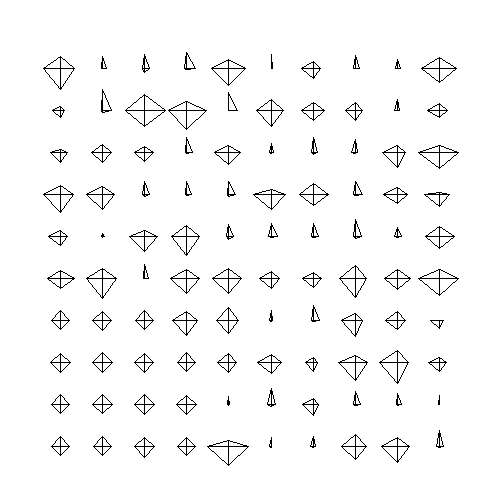
# 出力層をプロット
plot(model)
#abline(v = seq(0.5, 100.5, by = 1), h = seq(0.5, 100.5, by = 1)) # 各クラスの境界線を明確にする
head(model$codes)
## Sepal.Length Sepal.Width Petal.Length Petal.Width
## [1,] 5.843914 3.079311 3.704857 1.173350
## [2,] 5.843914 3.079311 3.704857 1.173350
## [3,] 5.949995 3.015165 4.002057 1.321238
## [4,] 5.783853 3.059938 3.683415 1.177109
## [5,] 7.640000 2.620000 6.830000 2.275000
## [6,] 4.400000 3.000000 1.300000 0.200000プロットされた出力層には四辺形が 10 × 10 個並んでいる。これらは、横右方向から反時計回りに、それぞれ model$codes 中の Sepal.Length、Sepal.Witdth、Petal.Lenth と Petal.Width の値を示している。
実際のデータがどのクラスに配属されたかをプロットするには、次のようにする。som パッケージの som 関数 とは異なり、class パッケージの SOM 関数の解析結果には座標情報が含まれていないため、自分で求める必要がある。
# 解析結果の座標情報を求める
classes <- as.numeric(knn(model$codes, val, 1:100))
# 同じ座標のデータが重ならないように、座標を少しずらすための乱数を付る
x.rand <- runif(nrow(iris), -0.2, 0.2)
y.rand <- runif(nrow(iris), -0.2, 0.2)
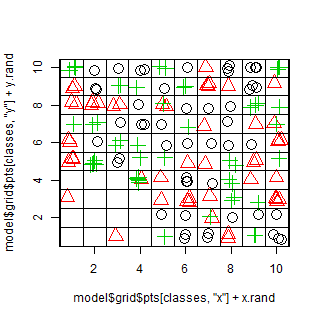
# プロット(左下の図)
plot(model)
points(
model$grid$pts[classes, "x"] + x.rand, # x座標
model$grid$pts[classes, "y"] + y.rand, # y座標
pch = tag, col = tag, cex = 2 # 色やプロットマーカーなど
)
abline(v = seq(0.5, 100.5, by = 1), h = seq(0.5, 100.5, by = 1)) # 各クラスの境界線を明確にする
# プロット(右下の図)
plot(
model$grid$pts[classes, "x"] + x.rand, # x座標
model$grid$pts[classes, "y"] + y.rand, # y座標
pch = tag, col = tag, cex = 2 # 色やプロットマーカーなど
)
abline(v = seq(0.5, 100.5, by = 1), h = seq(0.5, 100.5, by = 1)) # 各クラスの境界線を明確にする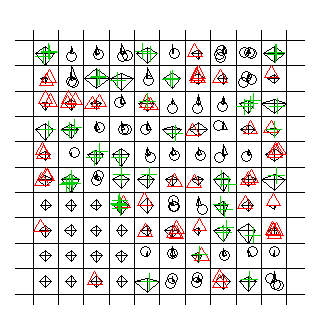
References
- Self- and Super-organising Maps in R: the kohonen package. J. Stat. Softw. 2007, 21:5. J. Stat. Softw.
- Self-Organiziing Maps. Springer. 1997.